
Huan YU
INTR
Safety-critical Traffic Control by Connected Automated Vehicles in Mixed-Autonomy
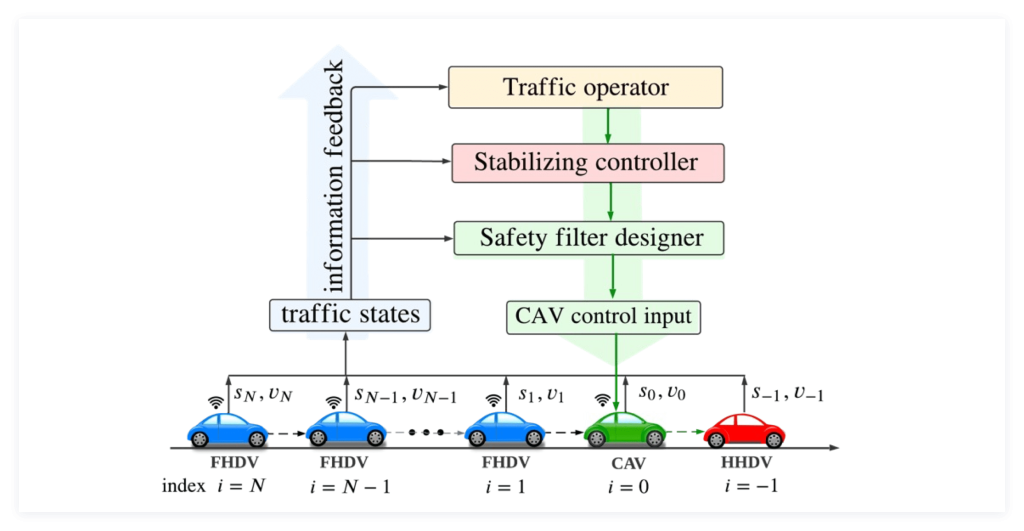
Connected automated vehicles (CAVs) have shown great potential in improving traffic throughput and stability. Although various longitudinal control strategies have been developed for CAVs to achieve string stability in mixed-autonomy traffic systems, the potential impact of these control strategies on safety has not yet been fully addressed. This topic studies safety-critical traffic control (STC) by CAVs---a strategy that allows CAVs to stabilize the mixed-autonomy traffic, while maintaining safety for surrounding traffic human-driven vehicles (HDVs).
Partial Differential Equation Model-based Control of Stop-and-Go Traffic Flow
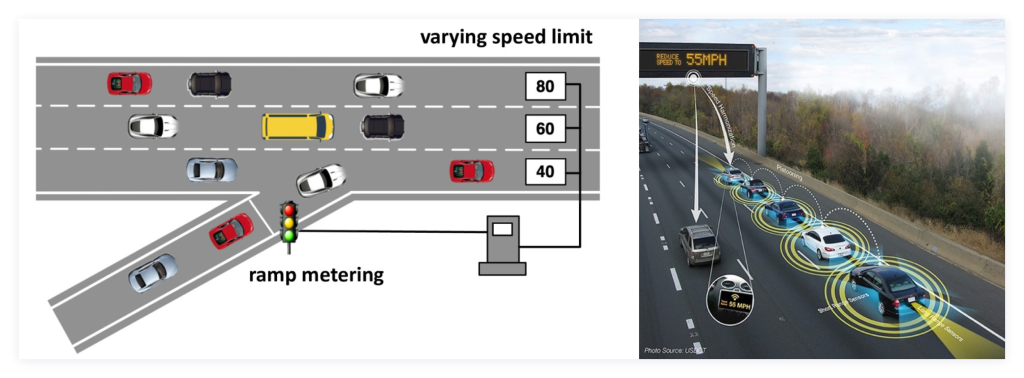
This topic studies control strategies that have been previously unavailable for suppressing stop-and-go oscillations in congested traffic using actuation that is very sparsely located along the freeway, such as traffic lights on ramp or variable speed limits. The macroscopic PDEs are particularly suited for modeling large-scale and congested traffic flow patterns, such as the stop-and-go traffic. The aggregated state values (i.e. density, speed, and flow rate) in the models evolve in continuous temporal and spatial domains. Focused on several macroscopic-level traffic problems, this research topic focuses on developing methodological PDE model-based control framework for boundary actuation and estimation for intelligent transportation systems that are empowered by connectivity and autonomy.