朱美新
智能交通
数据驱动交通仿真

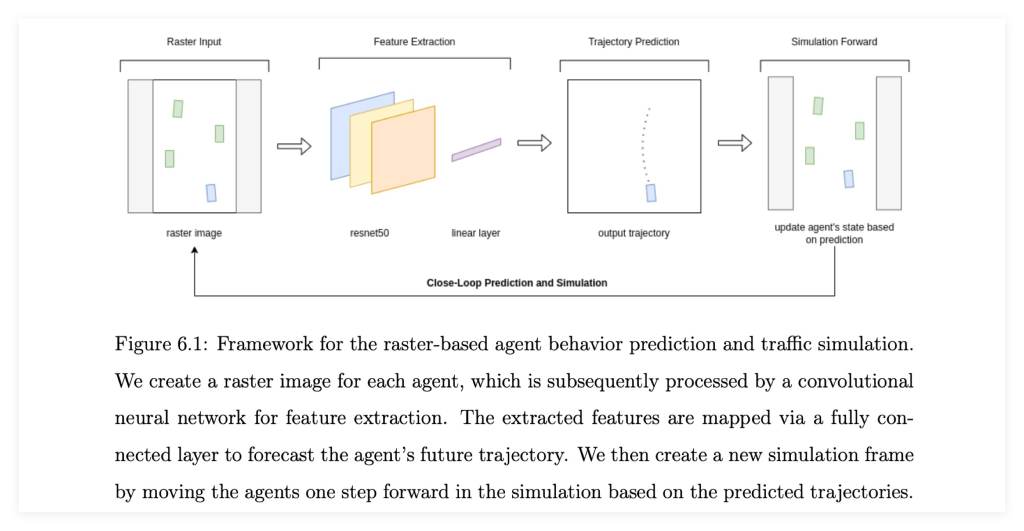
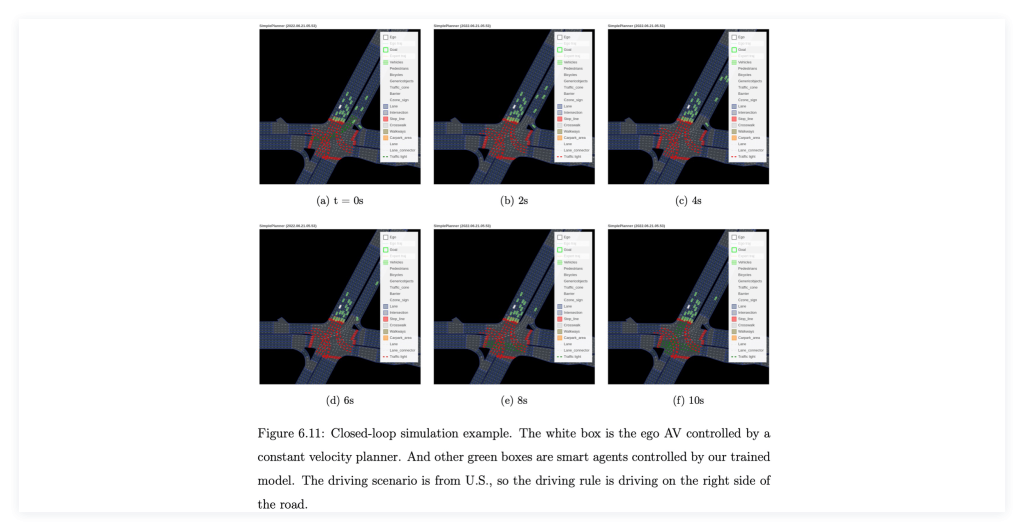
基于真实交通环境验证、评估自动驾驶算法是一项挑战。微观交通仿真因其可实现大规模测试和场景可复现性等优势成为测试自动驾驶算法的重要手段。然而,弥合仿真与真实世界之间的驾驶行为差异仍然是该领域的瓶颈。本项目根据真实世界驾驶数据,以端到端的方式学习一种数据驱动的全场景微观交通仿真模型,所产生的拟人化驾驶模型可真实、高效地对不同自动驾驶算法进行验证与评估。本项目研究将进一步提升传统微观交通流模型的精度与灵活性,揭示驾驶行为时空交互、车-车交互、车-路交互的行为机理,并为自动驾驶算法开发、验证、评估提供有力仿真环境支持。