贺登博
智能交通机器人与自主系统研究项目亮点
国标二级辅助驾驶车辆中驾驶员防御性驾驶行为的解析与能力提升
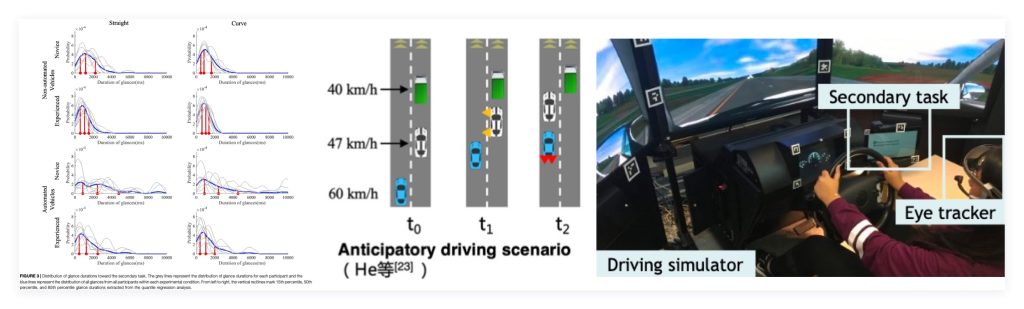
近几年,驾驶辅助技术的普及使得辅助驾驶的安全问题日益凸显。在可以预见的未来,驾驶员依然需要在辅助驾驶中关注路面和驾驶辅助系统状况,并随时做好接管准备。因此,在传统车辆中与安全密切相关的驾驶员防御性驾驶行为,依然可以帮助驾驶员在辅助驾驶场景下预判风险,增加紧急事件中的接管缓冲时间,从而提高行车安全。当前研究未能解析辅助驾驶场景下防御性驾驶行为与驾驶员心智模型、危险感知能力和注意力分配策略等因素的映射关系,也未能提出和验证可以提升驾驶员防御性驾驶能力的方法。本项目拟将防御性驾驶的概念引入到辅助驾驶中,基于问卷、模拟器实验、视频模拟实验、场地实车实验和自然驾驶实验的方法,量化国标二级(组合驾驶辅助)车辆中防御性驾驶行为的影响因素,提出和验证可以提升驾驶员防御性驾驶能力的方法(如车内交互和驾驶员培训),并探究方法的作用机制。本研究的成果将为驾驶辅助系统用户行为干预方法的制定提供理论基础和实践经验。
网约配送员分心驾驶行为的解析与干预
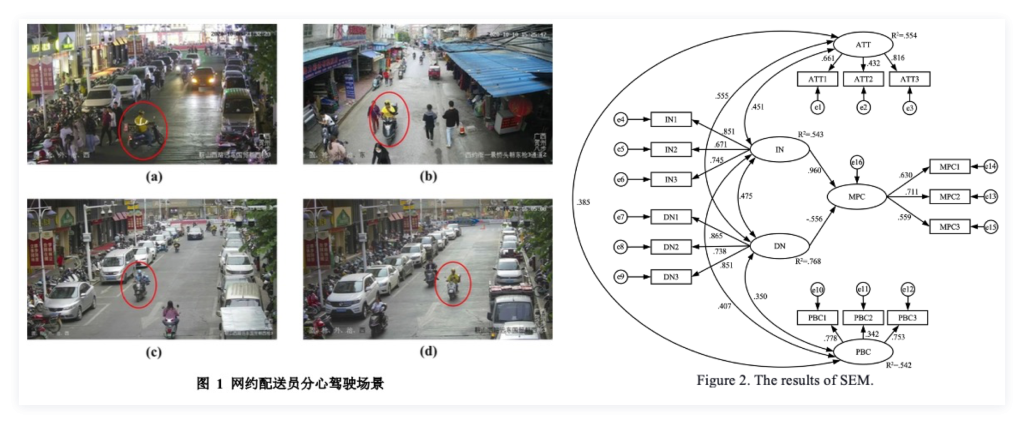
本项目将探究网约配送员分心驾驶的行为特征,基于对配送员工作流程和配送员分心驾驶行为心理动因的解析,建立配送员分心驾驶的行为模型。在此基础上,提出并验证配送流程优化方案、配送软件交互设计方案和配送员行为引导方案,以减少配送员因分心驾驶而造成的事故风险。研究成果可以为网约配送任务设计、配送平台移动端应用交互设计、配送员安全培训以及相关法律法规制定提供理论和实践基础,以提高网约配送员的驾驶安全。本项目将探究网约配送员分心驾驶的行为特征,基于对配送员工作流程和配送员分心驾驶行为心理动因的解析,建立配送员分心驾驶的行为模型。在此基础上,提出并验证配送流程优化方案、配送软件交互设计方案和配送员行为引导方案,以减少配送员因分心驾驶而造成的事故风险。研究成果可以为网约配送任务设计、配送平台移动端应用交互设计、配送员安全培训以及相关法律法规制定提供理论和实践基础,以提高网约配送员的驾驶安全。
电池电动车里程焦虑缓解与生态驾驶诱导
当前电池电动汽车续航能力和补能速度不足是限制其推广和使用的最大阻碍之一。驾驶员的“补能焦虑”心理引起的非理性的充电行为降低了电动汽车及充电网络的使用效率。因此,本项目旨在基于不同特征(如性格、驾驶经验等)的驾驶员群体,从空间和时间维度刻画电动车驾驶员的补能行为及其驱动因素,建立电动汽车用车行为画像,并据此优化驾驶员群体的补能行为,并通过驾驶辅助系统、车内信息提示、培训等手段引导驾驶员的节能驾驶行为,优化其充电行为,从而克服“补能焦虑”,以提高电动汽车使用效率、提高补能设施使用效率、并潜在提升电动汽车市场占有率。
基于驾驶员状态监测的辅助驾驶中驾驶员高认知负荷管理研究
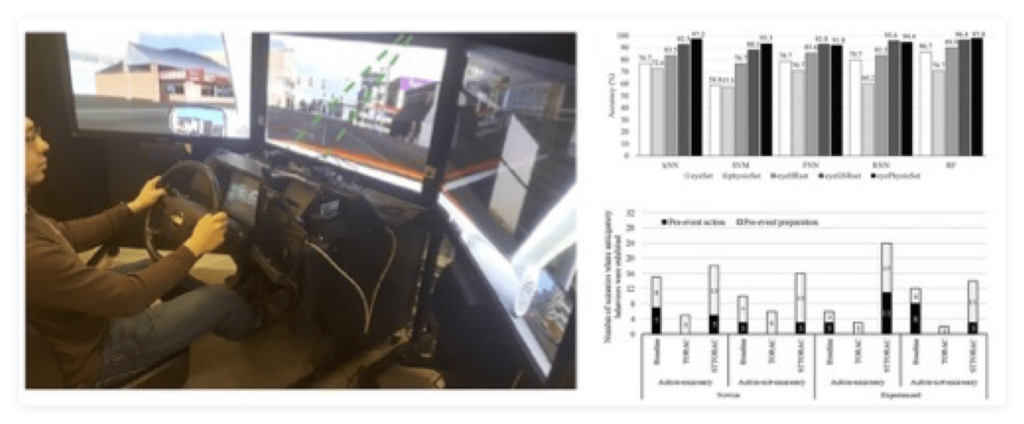
驾驶员过高的认知负荷会影响到其驾驶能力,威胁行车安全。在辅助驾驶中,尽管驾驶员不需要连续控制车辆,但依然需要实时关注路面状况,预判潜在危险,并及时接管车辆。因此,辅助驾驶中驾驶员的高认知负荷状态依然会增加驾驶风险。当前的辅助驾驶研究中,鲜有关注高认知负荷和驾驶员能力的关系,没有界定高危认知负荷状态的阈值。另一方面,当前已有的驾驶员认知负荷估算方法大多基于研究级别设备,难以实现对驾驶员状态的无感监测,因此难以在乘用车座舱中普及。且当前鲜有研究关注辅助驾驶中驾驶员高认知负荷的缓解方法。因此,本项目拟首先探究辅助驾驶中驾驶员认知负荷与驾驶能力的关系。在此基础上,探索基于非侵入式设备(如车辆集成传感器和智能手表)的驾驶员状态监测方法。最后,提出和验证自适应的驾驶员高认知负荷缓解方法(如车内交互设计和辅助驾驶共享控制)。本研究的结果可以为辅助驾驶和传统有人驾驶车辆中驾驶员状态监测系统的设计提供理论依据和实践基础。
混合交通流中人类道路使用者行为建模与分析

可以预见,在不久的将来,道路交通流将由自动驾驶汽车(AV)和人类驾驶汽车(HDV)组成,其中人类驾驶汽车仍将占大多数。而由此产生的混合交通流中AV和HDV将共享道路并进行频繁的交互行为。因此我们需要对这种高度交互环境中的人类驾驶行为进行建模与分析。这份研究目的是在现实世界中验证人类在与AV交互时的决策逻辑与其和HDV交互时的决策逻辑是否存在显著区别。为此,我们将使用包括统计和机器学习方法来分析各种AV-HDV交互行为,例如跟车和变道。有了这些发现,该项目将引入先进的AV控制算法,其中这些算法基于控制理论或强化学习并且利用AV对周围HDV的影响来达到所需的交通状态。
另一方方面,尽管辅助驾驶系统在大多情况下将模拟人类驾驶员的驾驶行为,然而辅助驾驶状态下的车辆在某些场景下的表现依然会有别于人类驾驶员。而传统非自动驾驶中,驾驶员可以预判其他道路使用者(如司机)的意图。而在人-自动驾驶混合场景中,人类驾驶员对自动驾驶车辆意图的理解可能受到多方面因素的影响。因此,需要关注混合交通场景下,人类驾驶员对同道路上处于驾驶辅助状态的车辆的行为的理解和行为决策博弈过程;并探究自动/辅助驾驶系统与其他人类道路交通使用者的交互方式。这部分研究可以提高混合交通状况下的安全性和效率,并且为自动驾驶控制系统的控制和博弈策略优化提供设计参考。
车辆运动晕眩的成因和缓解
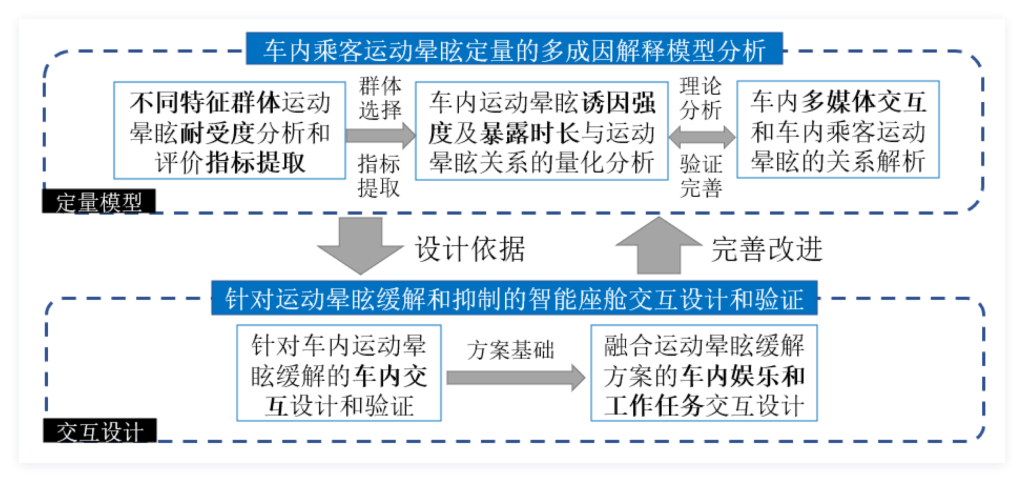
本项目将探究先进车辆技术(新能源,智能驾驶,智能座舱,车载VR等)对乘客运动晕眩的影响,以及其成因和解决方案。本研究拟通过在引入先进车辆技术后对车内乘客运动晕眩的诱因进行定量分析,解析不同的运动晕眩诱因在不同人群中的权重,探究运动晕眩诱因强度和累计量的关键阈值,建立运动晕眩的多成因解释模型。基于诱因定量分析,设计自适应的车内交互系统,降低乘客在进行车内娱乐和工作任务时产生运动晕眩的可能性。