赵航
机器人与自主系统研究项目亮点
研究领域
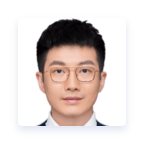
现代人类社会中,电机消耗了近50%的电量,其性能直接影响到机器人、电气化交通工具等先进工业化产品的表现优劣。赵航博士的课题组将以电机为核心,致力于研究前沿的材料及加工工艺,解析建模方法和控制策略,旨在设计出高功率密度、高控制精度的电机驱动系统;不断突破电机领域的软硬件瓶颈,进而推动智能化工业的发展。具体而言,赵航博士的研究方向主要包括:
1) 电机拓扑结构设计、解析建模及结构优化;
2)电机驱动中电力电子技术及控制策略研究;
3)电机驱动在机器人、电气化交通中的应用。
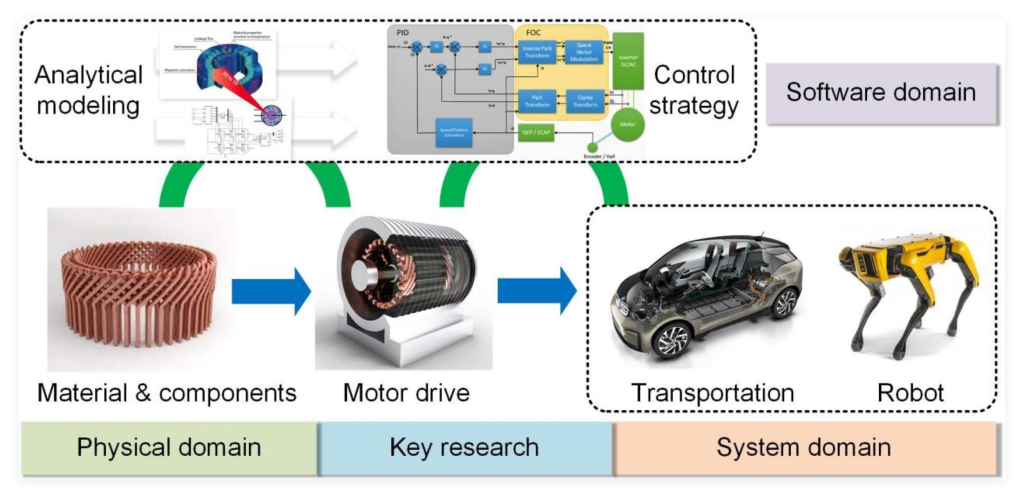
(1)精确电机多物理场解析建模
商用有限元分析方法在应用于新型电机拓扑(诸如磁场调制电机及轴向磁通电机时),会出现网格剖分复杂,计算时间过长等问题。针对这一现象,赵航博士运用解析建模的方法针对电机进行数学建模,可极大地提高电机电磁场参数的计算效率,并缩短电机的设计周期。以轴向磁通电机为例,赵航博士将复数形式的傅里叶级数法应用于此类电机的电磁参数计算,在保证计算精度的前提下,与有限元分析相比可以节省近40%的计算时间。后续课题组将进一步研究电机的机械结构、温度场等多物理场的高性能解析建模方法,并应用到电机驱动系统的综合设计分析中。
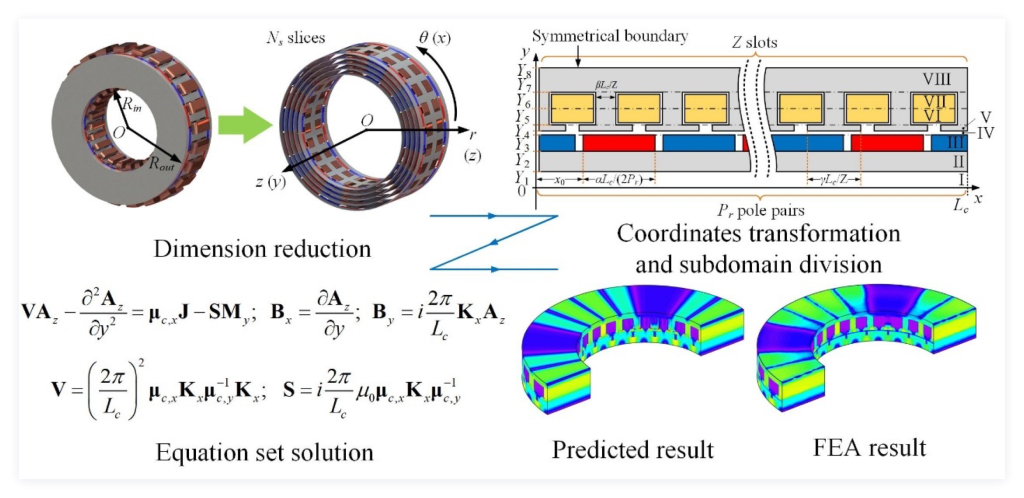
(2)下一代机器人用的一体化电机驱动系统
机器人研发、制造与应用是衡量一个国家科技创新和高端制造业水平的重要标志之一。现阶段机器人各关节多采用永磁同步电机加减速器的驱动方式,但此技术方案存在诸多弊端:精密减速器造价高昂,机械振动与噪声大,维护成本高,并且其制造加工技术被欧美国家垄断。赵航博士设计了以游标电机为执行器部件的直驱/半直伺服系统以取代现有技术方案,并利用前述的复数形式傅里叶级数法对游标电机的结构参数进行多目标优化,提高电机的优化效率。后续课题组将结合足式机器人、可穿戴式机器人等各类机器人应用场景的实际需求,设计相应高效执行器及驱动电路一体化的伺服系统。
(3)高功率密度电气化交通工具用的电机驱动系统

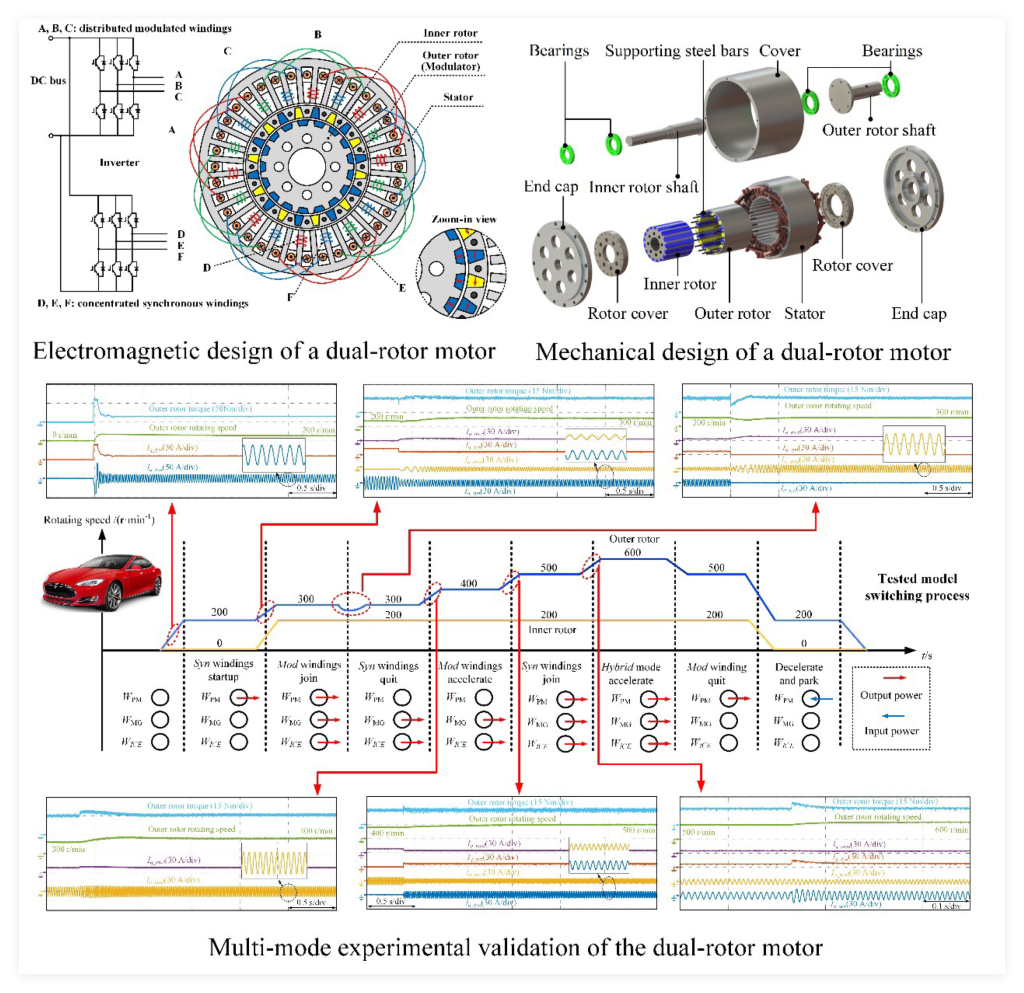
随着电机拓扑结构及电力电子技术的不断发展,电气化交通工具也逐渐普及。受电池能量密度限制,现阶段纯电动交通工具的行驶里程仍难以满足长距离出行及运输需求。因此混合动力交通工具将是未来很长一段时间内的最优解。以混合动力汽车为例,赵航博士提出了一种高性能的交替极双转子电机,以替换现有混合动力系统中的机械动力分配装置及电机结构。该新型结构减小了系统的振动噪声且提高了紧凑性。赵航博士完成了该电机的设计优化及驱动控制研究,并基于新标欧洲循环测试(NEDC)工况验证了样机多种运行工况间切换控制的可行性。后续课题组将针对各类交通工具的结构特点及运行特性,设计相应的高功率密度电机驱动系统,提高其综合性能表现。
成果转化
研究成果可用于解决如下问题:
1. 商用有限元软件对电机三维电磁场仿真过长的问题,所提出方法可缩短电磁场的计算时间,提高计算效率。该方法用于各类电机的初步设计,如家用电器的电机以及风电场的风力发电机等。
2. 现有工业机器人执行器部分集成度不高的问题,所提出的一体化高转矩,密度直驱电机可省去减速器的使用或降低减速比。该拓扑结构可应用于工业机器人及服务机器人的执行器等。
3. 现阶段电气化交通工具的驱动电机的转矩/功率密度不够高,所提出的新型轴向磁通电机可进一步提升其运行转速、转矩。该电机结构可应用于新能源汽车、电气化飞机及电气化船舶等。