季一丁
机器人与自主系统研究项目亮点
基于信息流不透明性的复杂信息物流系统信息安全分析与控制
作为本项目的研究基础,课题组前期围绕信息物理系统的信息安全与优化控制,在离散事件系统和形式化方法的框架内开展了系统性研究,在隐私保护、监督控制、性能优化等问题上取得了一系列原创性成果。具体而言,针对外界信息入侵下的信息物理系统信息安全问题,以信息流不透明性为分析手段,提出了基于信息混淆机制的系统隐私性保护方法,定量约束下的信息混淆机制设计方法,以及基于模块化设计机制的隐私性保护方法用以降低设计复杂度。此外,针对信息物理系统系统优化控制问题,引入动态博弈思想求解不完全信息下离散事件系统最优极限平均增益控制问题,以及基于局部平均增益和滚动事件窗口机制的监督控制器设计问题。
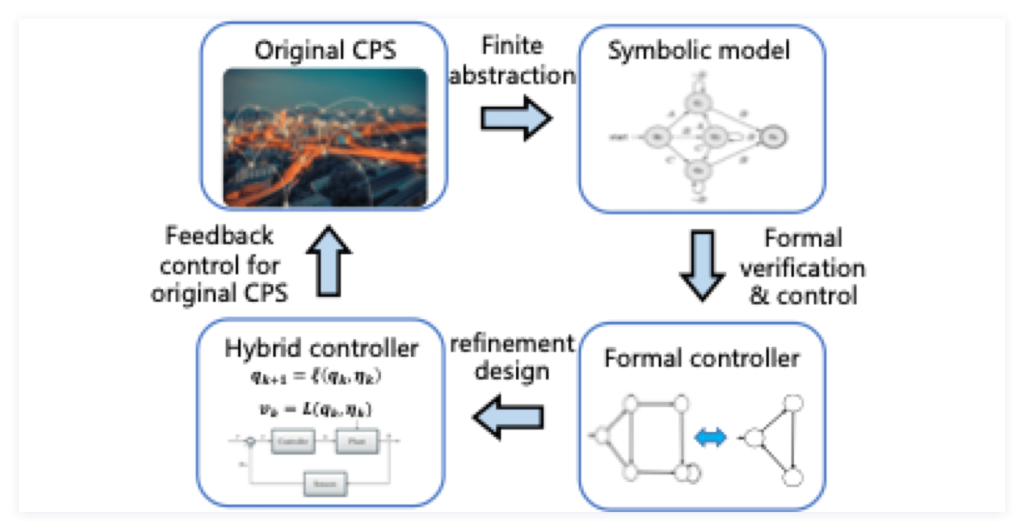
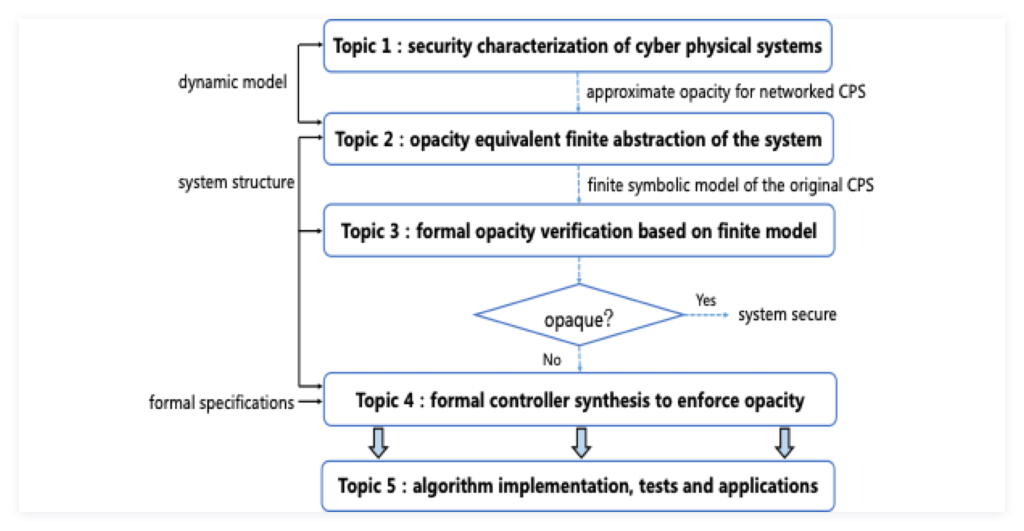
在上述研究的基础上,针对信息物理系统在外界入侵下的信息安全防护这一关键难题,考虑系统状态空间维度高,组成具有异构性,传感器与执行器存在指令延时和丢失等难点,围绕动态系统信息流不透明性这一核心概念,提出系统性的形式化信息安全分析和控制理论框架。具体而言,本项目研究内容包括以下几方面。一是针对具有信息物理系统组成上的异构性,考虑信道延迟与指令丢失等不利情况,提出适用于网络控制系统的近似不透明性概念,描述系统的信息安全特性。二是提出信息安全等价意义下的有限抽象方法,针对无限状态空间的系统建立符号化的有限模型。三是提出基于形式化方法的系统信息安全验证方法,判断系统在给定入侵下能否维持不透明性。四是针对验证结果为不安全的系统设计形式化的控制器,保证闭环系统满足不透明性。五是基于上述理论成果进行算法实现和软件开发,并在机器人和无人系统平台上进行验证与测试,进而开展机器人任务规划、无人驾驶车辆决策控制等场景下的应用。本项目的基本研究思路如图1所示,具体研究内容及其相互之间的关系如图2所示。