
郑心湖
智能交通
基于环境感知敏感度的多车目标检测语义融合

背景:
无人车辆依靠传感器采集的数据和感知算法完成对周围环境的感知,并根据感知结果做出驾驶决策,然后根据决策控制车辆进行实际驾驶操作。其中,环境感知是无人驾驶最基本、最关键的构成要素。基于传感器收集的数据,自主车辆需要对现实世界进行推断,以重建场景,提取场景中的语义信息,为后续的控制操作提供充足的信息。然而,当前无人驾驶技术还无法实现完全自主驾驶,也不能对动态环境的突然变化做出及时的反应。其主要原因是实际的驾驶场景要比现有数据集复杂得多,动态变化更频繁。为了克服单车感知的局限性,提高自主驾驶车辆应对环境突变的能力和可靠性,在下一代无线通信技术实现的推动下,车联网自主驾驶已成为该领域研究的新趋势。
亮点:
本项目将针对车辆在不同环境条件下的感知中采用的不同深度神经网络,通过一种基于环境特征的可靠性评估方案,以衡量神经网络感知环境变化的能力。当算法能够区分不同类型的环境特征,并能够在异常情况下保持感知能力时,其感知结果将更值得信赖。在多车协同感知场景下,为了信任来自不同车辆的感知结果,亟需在环境敏感度的基础上进一步建立一个感知信心评价模型,并通过该模型来量化神经网络感知结果输出的信心水平,实现VSN、VCN中的多车辆目标检测语义融合。最终克服单车感知的局限性,提高自主驾驶车辆应对环境突变的能力和可靠性。
项目图片1:环境特征与环境敏感度量化,
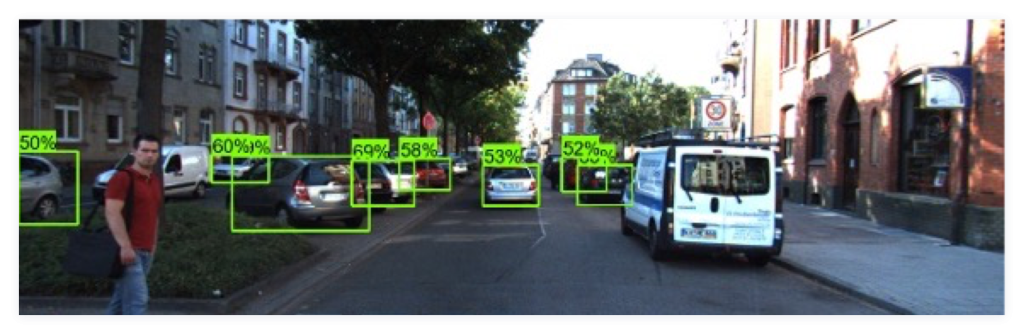
项目图片2:复杂场景语义目标与置信度,
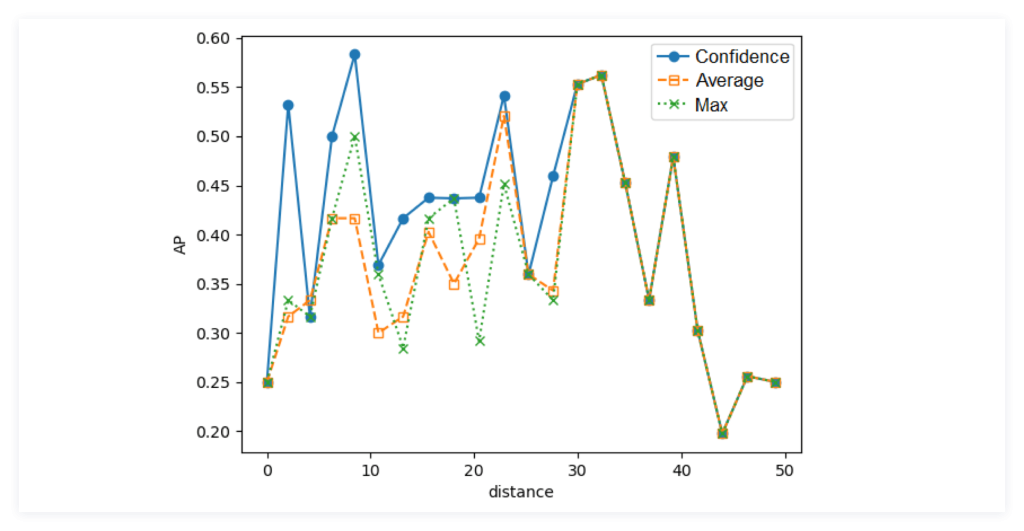
项目图片3:基于置信度的语义融合结果,